
在 butterfly 主题中添加首页点集动画(基于p2line项目)
Github仓库:https://github.com/luoy-oss/p2line
p2line:https://p2line.drluo.top
p2line预设参数:
XDog参数:p2line-xdog-params.json
PS参数:p2line-ps-params.json
使用之前,请使用p2line导出你想要的line.json点集数据文件,将其放置在你的博客路径下的 :
/themes/butterfly/source文件夹中
例如:
你的hexo项目路径:
E:/luoy
你的butterfly主题路径:
E:/luoy/themes/butterfly
请在E:/luoy/themes/butterfly/source路径下放置line.json
添加首页画布容器
在首页 header的index,pug 内加入画布容器:
12#home-line-animation canvas#line-canvas
参考位置:/themes/butterfly/layout/includes/header/index.pug
添加画布样式
让画布处于背景层并 ...

你好,2026
好快啊,其实感觉什么都没有准备好来着,就又是一年了。
这一年里洛玖的项目写了又咕,咕了又写,零零碎碎的。
时不时写的ai_chat功能,因为太懒,记忆功能一直没有往上加。
这一年里发生的事情又想不起来了,哦对,话说这是我第一次写年度总结唉,要不要从今年开始弄个历史年度?
好像暑假时候参加了最后一次电赛,也是一个大四老登了哈。还行,国奖也是帮实验室拿下了下年的邀请赛资格。
话说,后面要干什么一点没想好呢,4年感觉瞬间就过去了,要面临找工作的问题巴拉巴拉的。
很多想法起了又落,还是钱少哦。
嗯…我好像并不适合写年度总结,不知道要说什么也不知道要写什么,博客看的人其实也就我自己啦。
关于网站
让我翻翻git记录哈
2025年5月把页面源文件备份到了gihub仓库。
编写了blog-link-monitoring这个项目,也是心血来潮整了个友链监测奥。
好像就干了这一件事。
哦对,添加了rss订阅:https://www.drluo.top/atom.xml,方便爬取了
同时更换了友链的获取方式,使用github仓库issue托管https://github.com/luoy-oss/frie ...
stm32f4xx-ads1256驱动
通过ADS1256ReadVoltage或ADS1256ReadData函数读取ads1256的adc采样值
12345ADS1256_Init(ADS1256_GAIN_4);ADS1256ReadVoltage(ADS1256_MUXP_AIN0|ADS1256_MUXN_AIN1); // 获取AIN0/AIN1构成的差分通道的差分电压数据ADS1256ReadVoltage(ADS1256_MUXN_AIN2); // 获取AIN2通道的电压数据ADS1256ReadVoltage(ADS1256_MUXN_AIN3); // 获取AIN3通道的电压数据
注意:如果使用ADS1256ReadData函数,请注意初始化时的增益值ADS1256_GAIN_x
你需要对ADS1256ReadData获取到的数据进行处理:
具体处理方式可以参考ADS1256ReadVoltage函数:
12345double ADS1256ReadVoltage(unsigned char channel) { double voltage = ADS1256ReadData(channe ...
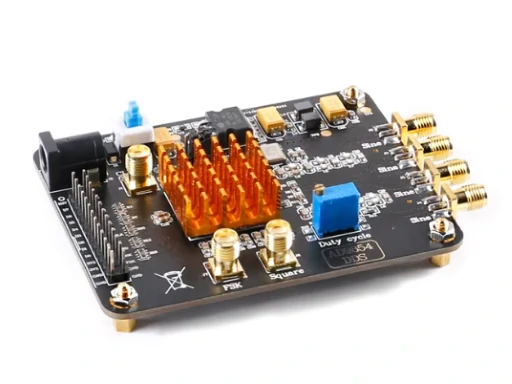
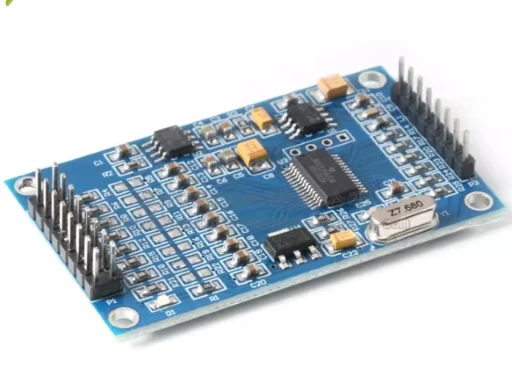
stm32f4xx-ad9854并行驱动
通过寄存器配置IO口并行配置a9854的信号输出频率
AD9854_SetSine(输出频率, 输出幅度);
调用格式:
12AD9854_Init();AD9854_SetSine(10000000.0, 4095); // 输出10MHz正弦波,幅度设置为最大(0~4095)
ad9854.h
12345678910111213141516171819202122232425262728293031323334353637383940414243444546474849505152535455565758596061626364656667686970717273747576777879808182838485868788#ifndef __AD9854_H__#define __AD9854_H__ #include <stdint.h>#include "stm32f4xx_hal.h"#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((a ...
主动式网站状态监测实现及其应用
近期有为博客添加网站状态监测页面的想法,可以监测友链的存活状态等
但是根据搜到的,可以使用UptimeRobot进行监测。但是其中的一些操作,比如调整监测页面链接需要进行包月付费
本着能省则省的原则,便想着不如着手实现一下主动监测。
这篇文章算是一个小项目总结与功能说明吧。
当前开发进度
定时查询 https://github.com/luoy-oss/luo9-link-monitoring
API https://github.com/luoy-oss/blog-link-monitoring
数据展示 https://github.com/luoy-oss/butterfly-link-monitoring
项目大概框架如下
定时任务 → API → MongoDB
部署的API服务通过 Vercel Cron 定时任务,主动从 GitHub Issues 获取友链数据并进行存活请求监测,并将状态数据存入MongoDB数 ...

右键菜单加入用Trae打开文件和文件夹
效果如下
鼠标右键文件夹/空白处,可以选择用Trae打开文件夹
鼠标右键文件,可以选择用Trae打开文件
一步到位的配置
一步到位的注册表代码:
这里我的Trae安装目录为:G:\Trae\Trae.exe
请你替换为你的Trae安装路径,注意反斜杠的转义:\\
12345678910111213141516171819202122Windows Registry Editor Version 5.00[HKEY_CLASSES_ROOT\Directory\Background\shell\Trae]"icon"="\"G:\\Trae\\Trae.exe\""@="用Trae打开文件夹"[HKEY_CLASSES_ROOT\Directory\Background\shell\Trae\command]@="\"G:\\Trae\\Trae.exe\" \"%V\""[HKEY_CLASSES_ROOT\Directory\shell\ ...

三角洲行动ID映射表
三角洲行动id映射表,角色、枪械、积分等。
你可以在github上找到本页面相应数据以及后续更新:
luoy-oss/deltaforce_id: 三角洲行动相关id映射表,角色、枪械、积分等。
角色
12345678910111213141516171819202122232425262728293031323334{ "40005": 88000000028, "10010": 88000000025, "40010": 88000000026, "20003": 88000000027, "30008": 88000000029, "10007": 88000000030, "30009": 88000000035, "20004": 88000000036, "30010": 88000000037}{ &q ...

洛玖SDK说明
洛玖SDK是一个用于开发洛玖机器人插件的综合性开发工具包。本文档将详细介绍SDK的核心功能、事件处理机制以及API接口的使用方法。
概述
洛玖SDK提供了一套完整的接口,使开发者能够轻松创建与洛玖机器人框架交互的插件。SDK基于Tokio运行时设计,支持异步操作,可以高效处理各类消息和事件。
插件结构
一个标准的洛玖插件需要根据你要求的message_types字段:
123456789101112let metadata = PluginMetadata { name: "hello_plugin".to_string(), describe: "一个简单的示例插件,用于演示基本功能".to_string(), author: "luoy-oss".to_string(), version: "0.1.0".to_string(), message_types: vec
为网页文章开头添加原文连接
本文介绍如何在博客文章页面添加原文链接,并进行动画效果美化,效果如下:
向插件目录中添加
post-copyright-link.pug文件
这里我使用的是butter_fly主题,post-copyright-link.pug文件放在了butterfly主题下的相关文件夹中:
/butterfly/layout/includes/post/post-copyright-link.pug
12345678.post-copyright-link .post-copyright-link-divider .divider-line-fancy .post-copyright-link-content span 原文链接: a(href=url_for(page.permalink) target="_blank")= page.title + ' | ' + config.title .post-copyright-link-divider .divider-line-fancy
向文章页面附加:
如果你使用的是b ...
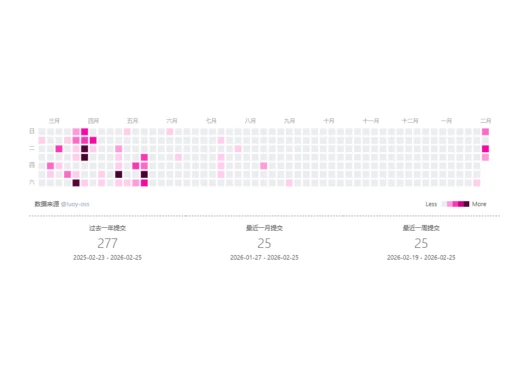
Hexo-Butterfly主题在主页添加GitHub贡献日历
本文介绍如何在博客添加GitHub贡献日历,效果如下:
需要用到的插件及API :
注:该插件来自博主 百里飞洋 基于原开源插件 hexo-github-calendar 、API python_github_calendar_api 改造
前端Hexo插件:https://github.com/Barry-Flynn/hexo-github-calendar
后端API部署:https://github.com/Barry-Flynn/python_github_calendar_api
作者: 百里飞洋 Barry-Flynn
链接: https://blog.meta-code.top/2022/03/15/2022-41/
来源: 百里飞洋
安装依赖
1npm i @barry-flynn/hexo-github-calendar --save
或者 使用 cnpm ,速度更快
1cnpm i @barry-flynn/hexo-github-calendar --save
添加配置
在 Hexo 项目根目录的 _config.yml 文件最后面添加如下配置
注意: ...